
- Today
- Total
| 일 | 월 | 화 | 수 | 목 | 금 | 토 |
|---|---|---|---|---|---|---|
| 1 | ||||||
| 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| 9 | 10 | 11 | 12 | 13 | 14 | 15 |
| 16 | 17 | 18 | 19 | 20 | 21 | 22 |
| 23 | 24 | 25 | 26 | 27 | 28 | 29 |
| 30 | 31 |
- 재능이의 돈버는 일기
- StresslessLife
- K_JIN2SM
- 소소한 일상
- My Life Style & Memory a Box
- Blog's generation
- 공감 스토리
- 취객의 프로그래밍 연구실
- Love Me
- Dream Archive
- 세상에 발자취를 남기다 by kongmingu
- hanglesoul
- 카마의 IT 초행길
- 느리게.
- 미친듯이 즐겨보자..
- Joo studio
- Gonna be insane
- 악 다 날아갔어!! 갇대밋! 왓더...
- xopowo05
- 맑은공기희망운동
- 엔지니어 독립운동
- 혁준 블로그
- Simple in Complex with Simple
- 무의식이 의식을 지배한다
드럼치는 프로그래머
[시스템분석및설계] 16,18장 적외선 센서 제어기 설계, 라인 트레이서 로봇 설계 결과보고서 본문
[시스템분석및설계] 16,18장 적외선 센서 제어기 설계, 라인 트레이서 로봇 설계 결과보고서
드럼치는한동이 2008. 3. 14. 02:56◎ 실험 목적
▶ 적외선 센서 제어기와 라인 트레이서 로봇의 동작을 VHDL로 기술하고, 시뮬레이션을 통해 동작을 검증한다.
◎ 실험 장비
▶ Xilinx ISE
▶ ModelSIM
▶ Rov-Lab 트레이닝 키트
◎ 실험 순서
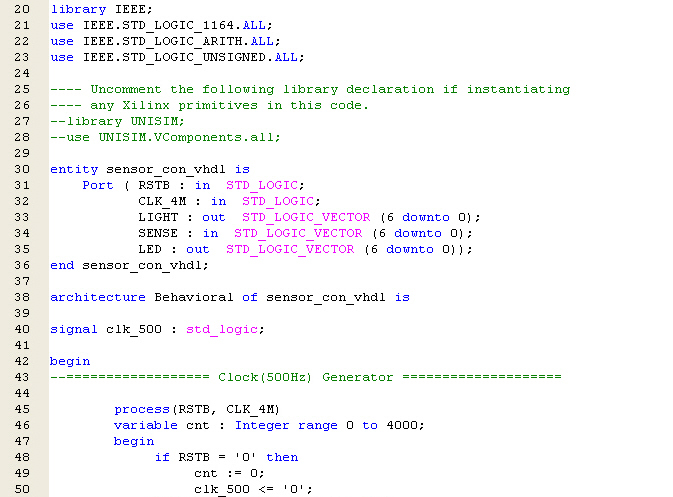
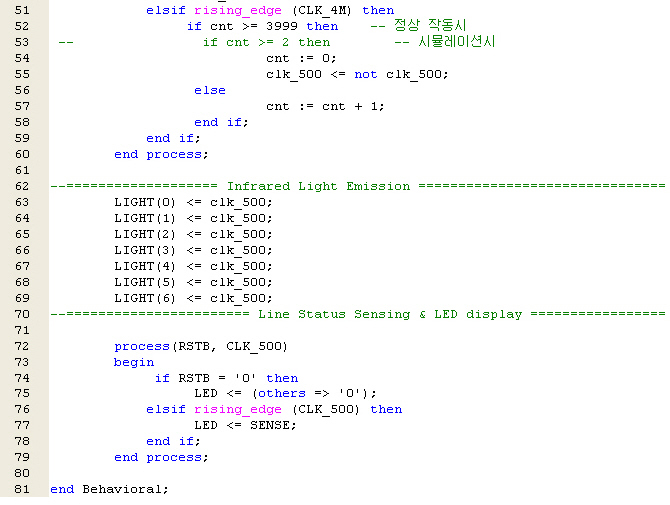
▶ 적외선 센서 제어기 설계
① 적외선 센서 제어기의 동작을 VHDL로 기술
② TestBenchWaveform으로 시뮬레이션
③ 트레이닝 키트로 동작 검증
▶ 라인 트레이서 로봇 설계
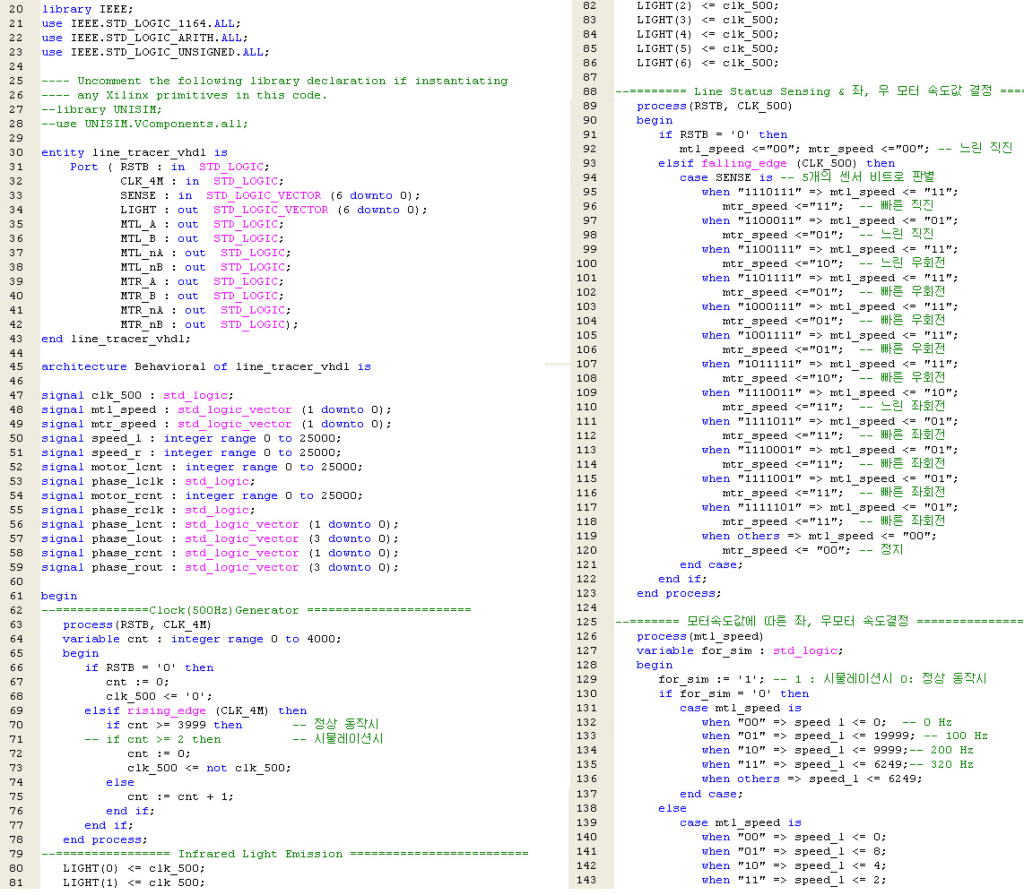
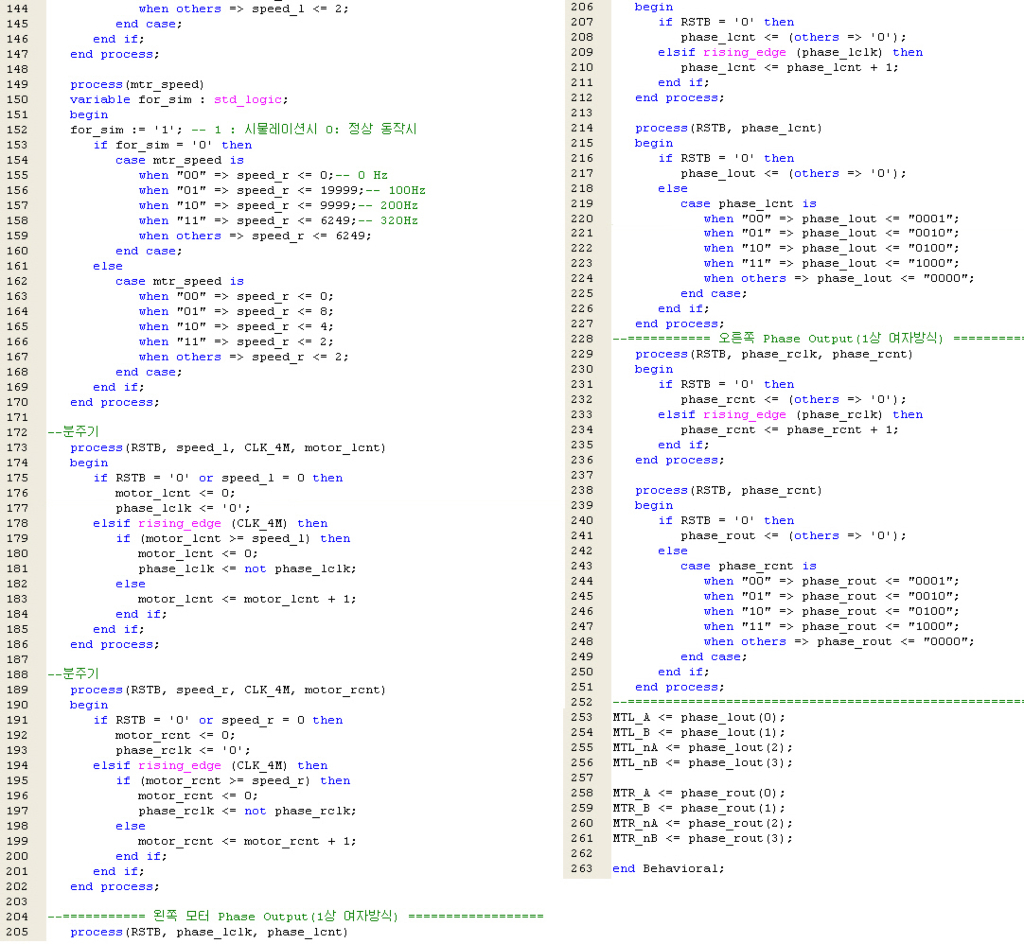
① 라인 트레이서 로봇의 동작을 VHDL로 기술
② TestBenchWaveform으로 시뮬레이션
③ 트레이닝 키트로 동작 검증
[ 검은 선을 감지하여 움직이는 모습 ]
◎ 실험 결과

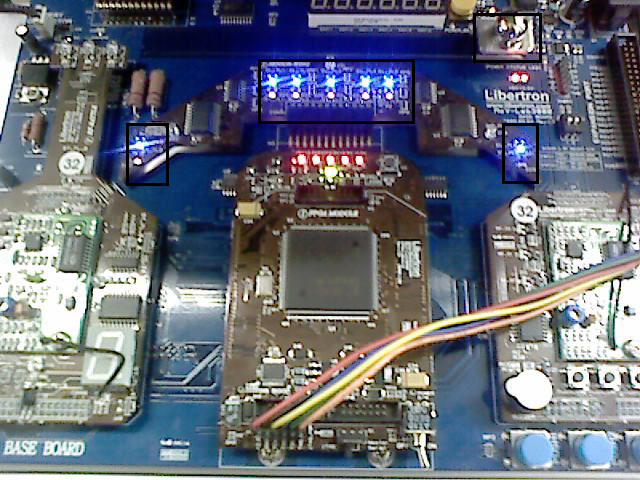
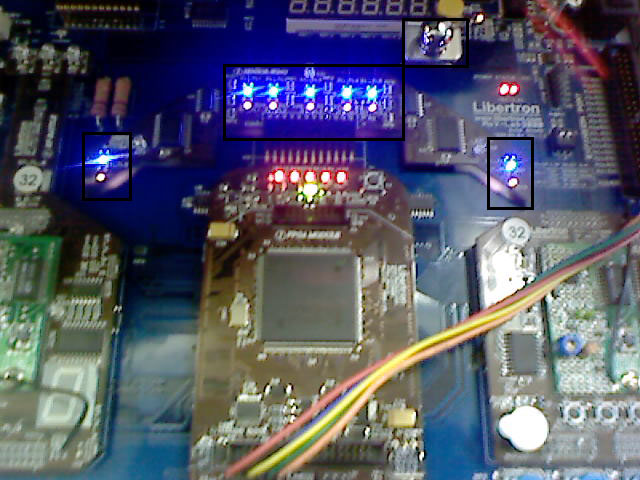
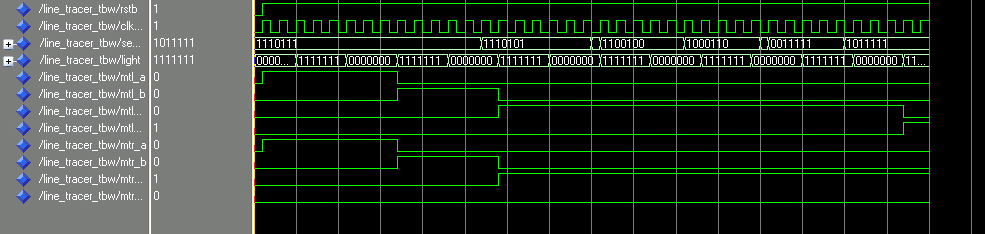



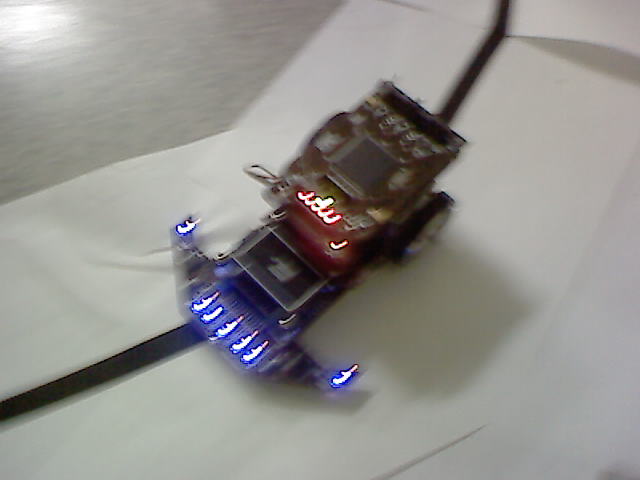

▶ 이론에서 살펴본 적외선 센서 제어기와 라인 트레이서 로봇의 진리표대로 설계된 회로가 정확하게 동작함을 알 수 있었다.
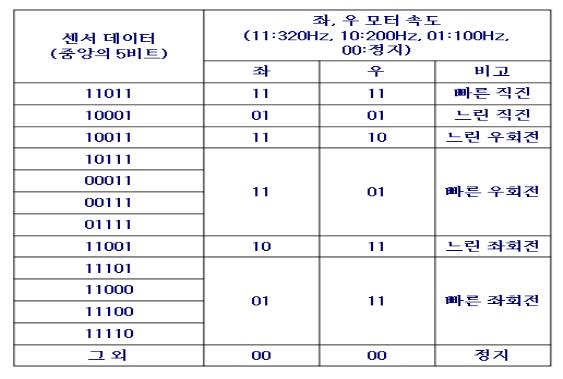
<라인 트레이서 로봇 설계>
◎ 실험의 개선점
① 라인 트레이서 로봇의 회로 동작에 대한 이해가 조금 부족했다.
② 코드 작성부분의 소요 시간에 비해 로봇 구동 시간이 오래 걸렸다.
=> 로봇의 대한 동작법을 숙지하여 소요되는 시간을 줄이겠다.
③ 키트 사용법이 아직 서툴러 많은 실수를 범했다.
=> 수시로 키트 사용법을 연습하여 실험에 소요되는 시간을 줄이겠다.
④ 결과보고서를 위한 캡쳐가 서툴렀다.
=> 센서를 감지하여 움직이는 로봇에 대한 사진을 찍으려니 실험을 여러번 시도 하였 다. 사진의 연속 촬영으로 사진을 캡쳐하도록 하겠다.
⑤ 센서 데이터에 따라 좌, 우 모터 속도가 결정되는 부분에 대해 이해가 조금 부족했다.
=> VHDL 코드와 실험과의 매칭을 시키는 부분에서 이해가 부족한 점을 개선하겠다.
'★─Multi Media > ☆─2학년 2학기' 카테고리의 다른 글
| [시스템분석및설계] 19장 원격 조정 로봇 설계 결과보고서 (0) | 2008.03.14 |
|---|---|
| [시스템분석및설계] 19장 원격 조정 로봇 설계 예비레포트 (2) | 2008.03.14 |
| [시스템분석및설계] 17, 18장 무선 통신 제어기 설계, 라인 트레이서 로봇 설계 예비레포트 (0) | 2008.03.14 |
| [시스템분석및설계] 16장 적외선 센서 제어기 설계 예비레포트 (0) | 2008.03.14 |
| [시스템분석및설계] 15장 스텝 모터 제어기 설계 결과보고서 (0) | 2008.03.14 |